 ООО "Арзамасское приборостроительное конструкторское бюро" г. Арзамас ул. 50 Лет ВЛКСМ д. 22 8 (83147) 9-55-05
ООО "Арзамасское приборостроительное конструкторское бюро" г. Арзамас ул. 50 Лет ВЛКСМ д. 22 8 (83147) 9-55-05 Гироскопические датчики и системы
Эффективность и конкурентоспособность современных летательных аппаратов (ЛА) во многом определяется совершенством гироскопических датчиков первичной информации, на базе которых строятся навигационные системы и системы управления ЛА.
В настоящее время существует большое многообразие различных типов гироскопических датчиков, правильное применение которых обеспечивает необходимые эксплуатационные качества ЛА.
Каждому типу гироскопических датчиков можно найти оптимальную нишу применения. При выборе гироскопического датчика учитываются следующие его основные характеристики: точность, надежность работы, энергопотребление, габаритные размеры и стоимость. В зависимости от требований, предъявляемых к системам управления и навигационным системам, выбирается соответствующий тип гироскопического датчика.
Тем не менее, из всего многообразия датчиков можно выделить наиболее перспективные по указанным выше характеристикам. Это лазерные гироскопы (ЛГ), волоконно-оптические (ВОГ), волновые твердотельные (ВТГ) и микромеханические гироскопы (ММГ).
Основным их преимуществом является повышенная надежность работы из-за отсутствия быстро вращающихся роторов и карданных подвесов, минимальное потребление электроэнергии за счет реализации основных функциональных узлов на базе сервисной микроэлектроники и возможность повышения точностных характеристик путем математической обработки первичных сигналов датчиков в микропроцессорах.
Гироскопические датчики являются источниками первичной информации при построении пилотажных и навигационных систем летательных аппаратов.
В пилотажных системах они используются в основном в качестве датчиков угловых скоростей в цепях обратной связи автоматических систем управления. В навигационных системах — в качестве датчиков углового положения самолета или индикатора нулевого положения гиростабилизированной платформы. В качестве датчиков линейных ускорений используются акселерометры.
Рассмотрим некоторые схемы построения инерциальных навигационных систем на базе гироскопических датчиков. Основными задачами любой навигационной системы является определение местоположения летательного аппарата в географических координатах – долготы (λ) и широты (φ) местонахождения, скорости (υ) и высоты (h) полета, углового положения относительно своего центра тяжести в инерциальном пространстве – курса (ψ), тангажа (ϑ), крена (γ). На рис.1.1 и рис.1.2 показаны эти параметры, принятые в авиации.
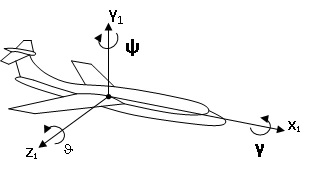
Рис. 1.1 Углы ориентации самолета
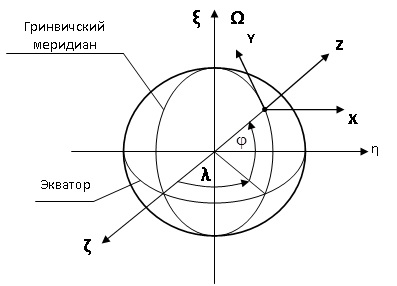
Рис.1.2 Системы координат, в которых определяется положение летательного аппарата
На рисунках 1.1, 1.2:  – географическая система координат, где ось ξ – совпадает с осью вращения Земли и направлена на Север; ось ς – лежит в плоскости экватора и проходит через Гринвичский меридиан; ось η – также лежит в плоскости экватора и направлена на Восток.
– географическая система координат, где ось ξ – совпадает с осью вращения Земли и направлена на Север; ось ς – лежит в плоскости экватора и проходит через Гринвичский меридиан; ось η – также лежит в плоскости экватора и направлена на Восток.  – базовый сопровождающий трехгранник, относительно которого определяется угловое положение летательного аппарата, где ось X – направлена на Восток; ось Y – направлена на Север по меридиану; ось Z – по вертикали местности.
– базовый сопровождающий трехгранник, относительно которого определяется угловое положение летательного аппарата, где ось X – направлена на Восток; ось Y – направлена на Север по меридиану; ось Z – по вертикали местности. – оси измерительного трехгранника инерциальной навигационной системы.
– оси измерительного трехгранника инерциальной навигационной системы.
Инерциальные навигационные системы подразделяются на две большие группы – платформенные и бесплатформенные.
Независимо от типа навигационной системы информация о скорости полета летательного аппарата и пройденном пути находится из показаний акселерометров путем интегрирования их выходных сигналов – линейных ускорений  . Однако достоверность этой информации зависит от точности определения положения осей чувствительности акселерометров относительно заданных в инерциальном пространстве базовых измерительных осей – осей инерциального сопровождающего трехгранника.
. Однако достоверность этой информации зависит от точности определения положения осей чувствительности акселерометров относительно заданных в инерциальном пространстве базовых измерительных осей – осей инерциального сопровождающего трехгранника.
В платформенных навигационных системах заданное положение осей базового сопровождающего трехгранника достигается стабилизацией положения в инерциальном пространстве платформы, на которой установлены акселерометры. Необходимая стабильность положения обеспечивается системами автоматического регулирования трех рам карданова подвеса, в которых в качестве датчиков системы регулирования используются, как правило, механические двух или трехстепенные гироскопы с быстро вращающимся ротором, а в качестве исполнительного органа – датчики моментов (DM) соответствующих рам карданова подвеса.
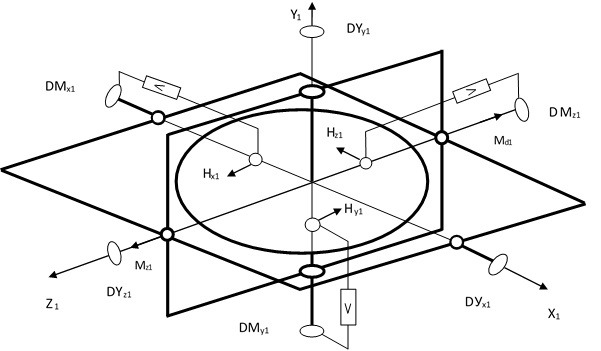
Рис.1.3 Схема построения платформенной навигационной системы
Гироскопы устанавливаются на той же платформе, что и акселерометры (рис.1.3). Чем выше точность гироскопов, тем с меньшей погрешностью осуществляется стабилизация положения платформы, тем точнее определяются скорость и местоположение летательного аппарата.
Информация об угловом положении центра тяжести летательного аппарата снимается с трех датчиков угла  , установленных по осям рам карданова подвеса.
, установленных по осям рам карданова подвеса.
В качестве примера рассмотрим стабилизацию положения платформы по одной из измерительных осей навигационной системы – по оси  (рис.1.3). При повороте платформы под действием возмущающего момента
(рис.1.3). При повороте платформы под действием возмущающего момента  вокруг оси ось гироскопа
вокруг оси ось гироскопа  начнет прецессировать (поворачиваться) вокруг оси
начнет прецессировать (поворачиваться) вокруг оси  на угол ε. В датчике угла гироскопа появится напряжение рассогласования Uε, которое после усиления подается на моментный двигатель
на угол ε. В датчике угла гироскопа появится напряжение рассогласования Uε, которое после усиления подается на моментный двигатель  тангажной рамы. Последний создаст момент
тангажной рамы. Последний создаст момент  , под действием которого рама будет возвращаться в исходное положение. При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла
, под действием которого рама будет возвращаться в исходное положение. При этом ротор гироскопа начнет прецессировать в противоположную сторону до тех пор, пока Uε не станет равным нулю. Информацию об угле поворота летательного аппарата вокруг тангажной оси будем получать от датчика угла  , установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.
, установленного на оси рамы. Аналогичным образом осуществляется управление и определение курсового угла и крена по двум другим осям карданова подвеса.
Из представленной схемы видны основные недостатки платформенных инерциальных систем – большое количество механических вращающихся элементов, наличие аналоговых систем регулирования и, как следствие, невысокая надежность работы системы.
Появление и развитие гироскопических датчиков на новых физических принципах — ЛГ, ВОГ, ВТГ, ММГ, в которых отсутствуют быстро вращающиеся механические ротора, позволило перейти к созданию инерциальных навигационных систем повышенной надежности – бесплатформенных инерциальных навигационных систем (БИНС).
В БИНСах нет карданова подвеса, а роль стабилизированной платформы выполняет базовый сопровождающий трехгранник (рис.1.2), относительно которого определяется положение измерительных осей БИНС в процессе полета летательного аппарата.
В качестве гироскопических датчиков в БИНС используются три одноосных гироскопа и три акселерометра, которые жестко устанавливаются в блоке чувствительных элементов БИНС по трем ортогональным измерительным осям (рис.1.4). Блок чувствительных элементов, в свою очередь, жестко связан с корпусом летательного аппарата.
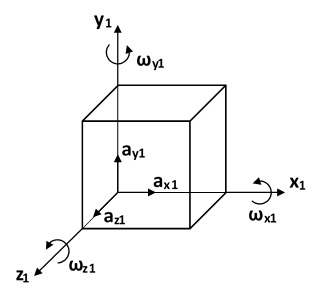
Рис.1.4 Измерительные оси блока чувствительных элементов БИНС
Гироскопы служат для определения углового положения измерительных осей блока чувствительных элементов относительно базового сопровождающего трехгранника, то есть углов крена, тангажа и курса летательного аппарата. Поскольку используемые в БИНС гироскопы работают, как правило, в режиме датчиков угловых скоростей, то для определения указанных углов их показания интегрируются  . Показания акселерометров, как и в платформенных системах, служат для определения скорости движения летательного аппарата и пройденного им пути. С этой целью показания акселерометров также интегрируются
. Показания акселерометров, как и в платформенных системах, служат для определения скорости движения летательного аппарата и пройденного им пути. С этой целью показания акселерометров также интегрируются  .
.
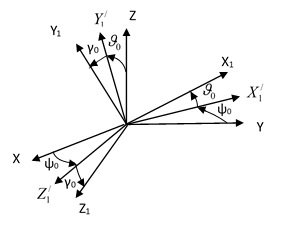
Рис.1.5 Начальные углы выставки БИНС
Перед началом полета осуществляется выставка БИНС, то есть определение начального углового положение  измерительных осей () относительно осей базового сопровождающего трехгранника () (рис.1.5). Величина этих углов заносится в бортовой компьютер и учитывается при определении углового положения самолета в процессе его полета.
измерительных осей () относительно осей базового сопровождающего трехгранника () (рис.1.5). Величина этих углов заносится в бортовой компьютер и учитывается при определении углового положения самолета в процессе его полета.
Полное отсутствие механических вращающихся частей делает БИНС чрезвычайно надежной системой в эксплуатации, а использование высокоскоростной бортовой вычислительной машины позволяет повысить точность такой системы за счет алгоритмической компенсации погрешностей гироскопических датчиков, обусловленных колебаниями температуры окружающей среды и механическими воздействиями.
Но не зависимо от типа навигационной системы ее технические возможности определяются в первую очередь техническими характеристиками гироскопических датчиков.